A parkoláskezelő rendszerek a 3D felé haladhatnak
A városok világszerte kísérleteznek a parkolás okosabb kezelési módjaival. Egyesek a parkoló foglaltsági adatait használják fel az árak dinamikus kiigazításához, ezáltal biztosítva a megfelelő hely rendelkezésre állását; mások földi érzékelőkkel felszerelt, út menti parkolórendszereket telepítenek, integrálva azokat szélesebb körű intelligens városi platformokba; megint mások hálózatba kapcsolt érzékelőket alkalmaznak több ezer egyéni parkolóhely figyelésére. Ezeknek a kezdeményezéseknek egyértelmű célja közös: a gépjárművek torlódásainak csökkentése, az út menti parkolás hatékonyságának növelése és a korlátozott városi terek hatékonyabb kihasználása.
Bár ezekparkoláskezelő rendszerekvilágszerte számos országban alkalmazták, sok még mindig töredezett vagy hiányos adatokra támaszkodik. A földi érzékelők/hurokérzékelők telepítése és nagyarányú karbantartása költséges, míg a kamerás megfigyelőrendszerek érzékenyek lehetnek a fényviszonyokra, vagy adatvédelmi aggályokat vethetnek fel. Ahogy a városok igyekeznek bővíteni intelligens parkolási kezdeményezéseiket, a kihívás nem csupán az adatgyűjtésben rejlik, hanem abban, hogy ezt megbízhatóan, hatékonyan és nagyarányúan tegyék.
A LiDAR technológia kezd jelentős teret hódítani a parkolásirányítási rendszerek szektorában. A LiDAR – a Light Detection and Ranging mozaikszó – lézerimpulzusokat alkalmaz a fizikai környezettel kapcsolatos háromdimenziós információk pontos rögzítésére, ezáltal szilárd adatalapot biztosítva a modern parkoláskezeléshez. A parkolóhelyek kihasználtságának figyelésétől a járműtípusok osztályozásáig a LiDAR-alapú rendszerek lehetővé teszik a kezelők számára, hogy betekintést nyerjenek a parkolás dinamikájába olyan részletességgel, amelyet a hagyományos megoldások nehezen tudnak elérni.

Miért alkalmas a LiDAR az intelligens parkolási rendszerekhez?
A LiDAR lényegében lézerimpulzusokat használ a távolságok mérésére. Ezek a mérések a környezet sűrű, háromdimenziós reprezentációját generálják, amelyet "pontfelhőnek" neveznek. A kamera képeivel ellentétben ezeket az adatokat nem befolyásolják a környezeti fényviszonyok; ehelyett nagy pontossággal írja le a környező környezet geometriáját.
Ezek a 3D adatok számos előnyt kínálnak a parkolási alkalmazások számára.
Először is, a LiDAR egyenletes teljesítményt biztosít a folyamatosan változó környezeti feltételek mellett. A kamerarendszereket jellemzően veszélyeztető tényezők – például a sötétség, a tükröződés vagy az árnyékok – minimális hatással vannak a lézeres mérésekre. Emiatt a LiDAR különösen alkalmas kültéri parkolókban, garázsokban és út menti környezetben, ahol a fényviszonyok a nap folyamán ingadoznak.
Másodszor, a LiDAR inkább fizikai struktúrákat rögzít, mint vizuális megjelenéseket. A járműveket, a járdaszegélyeket, az akadályokat és a gyalogosokat a rendszer háromdimenziós objektumként érzékeli. Ez lehetővé teszi az algoritmusok számára, hogy megbízhatóan azonosítsák és nyomon kövessék az objektumokat anélkül, hogy először elemezniük kellene a félreértelmezésre hajlamos kétdimenziós képeket.
Végül a LiDAR adatok támogatják a magánélet-tudatos megfigyelést. Mivel ez a technológia a távolságot méri, nem pedig a vizuális részleteket, nem rögzíti az azonosítható elemeket – például emberi arcokat vagy rendszámtáblákat –, hacsak nem egészítik ki további érzékelőkkel. A szigorú adatvédelmi követelményekkel szembesülő önkormányzatok és üzemeltetők számára ez jelentős előnyt jelenthet. Ezek a jellemzők együttesen teszik a LiDAR-t az adatvezérelt parkolórendszerek erőteljes alapjává.

Foglaltságfigyelés: LiDAR a gyakorlati parkoláskezelő rendszer alkalmazásaiban.
A LiDAR egyik legközvetlenebb alkalmazása a parkolási környezetben a járművek foglaltságának figyelése.
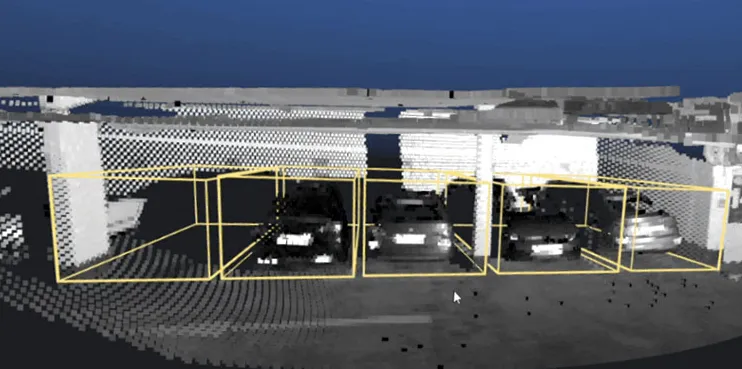
Egy tipikus telepítési forgatókönyv szerint a LiDAR érzékelőket a meglévő infrastruktúrára szerelik fel – például villanyoszlopokra vagy épületek homlokzataira –, amelyek egy parkolóra vagy utcai területre néznek. A szenzorok folyamatosan pásztázzák a környezetüket, 3D adatpontokat generálva. A szoftver ezeket az adatokat valós időben dolgozza fel az objektumok észlelésére, pontos helyük meghatározására és osztályozására.
A rendszeren belül parkolóhelyek is kijelölhetők. Amikor egy jármű belép a megfigyelt zónába, az érzékelők észlelik azt a pontfelhőn belül egy olyan objektum azonosításával, amely korábban nem volt jelen. Az észlelt pontok változást váltanak ki a parkolóhely foglaltsági állapotában. Amikor a jármű elindul, a hely ezt követően ismét szabadnak jelöli.
A LiDAR adatok rendkívül nagy pontossága miatt az egyes megfigyelési zónákon belül észlelt objektumokhoz méretküszöbök határozhatók meg. Ez biztosítja, hogy a kis tárgyak – például bevásárlókocsik, törmelékek vagy elhaladó gyalogosok – ne idézzenek elő téves foglaltsági eseményeket. A parkolóhely csak akkor van foglaltként megjelölve, ha az észlelt tárgy meghaladja az előre beállított paramétereket (pl. egy jármű jellemző méreteit). Ez a konfigurálható szűrőmechanizmus növeli az észlelési pontosságot, megbízható foglaltsági adatokat biztosítva még a gyakori járműmozgásokkal jellemezhető összetett környezetben is.
Mivel a LiDAR átfogó térinformáció rögzítésére képes, egyetlen érzékelő gyakran több parkolóhelyet is képes egyszerre figyelni. Strukturált környezetekben – például parkolókban vagy egyértelműen meghatározott határokkal rendelkező járdaszegélyes területeken – egyetlen telepítés hatékonyan lefedhet egy teljes zónát.
Míg hasznos tudni, hogy egy parkolóhely foglalt-e, még értékesebb lehet annak megértése, hogy „mi” van elfoglalva.
LiDAR alapúparkoláskezelő rendszerekosztályozhatja a járműveket méretük és alakjuk alapján. A pontfelhőben rögzített 3D geometria elemzésével az algoritmusok különbséget tudnak tenni az olyan kategóriák között, mint a személygépkocsik, kisteherautók, teherautók vagy kétkerekű járművek.
Ez az információ a gyakorlati alkalmazások széles skáláját nyitja meg. Például az üzemeltetők elemezhetik, hogy az eredetileg rövid távú utasszállításra szánt járdaszéli parkolóhelyeket gyakran foglalják-e el szállító furgonok. Hasonlóképpen, a nagyméretű járművekre vonatkozó adatok segíthetik a városokat a rakodási zónákon vagy kereskedelmi parkolókon belüli parkolási igények felmérésében.
A járművek besorolása a hatékonyabb végrehajtást is elősegíti. Ha a szabályozás korlátozza bizonyos típusú járművek meghatározott terek használatát, az automatizált megfigyelőrendszerek megjelölhetik a lehetséges jogsértéseket felülvizsgálat céljából.
A parkolóhelyeken belül a járműbesorolási adatok segítenek a kezelőknek megérteni, hogy a különböző méretű járművek hogyan befolyásolják a kapacitást és a forgalom hatékonyságát. Ahogy a városi járműflották egyre változatosabbá válnak – a kompakt elektromos járművektől a nagy teherautókig –, ezek az információk egyre fontosabbak a létesítmények tervezése szempontjából.
Fontos, hogy ezek az elemzések a vizuális felismerés helyett a háromdimenziós jellemzőkre támaszkodnak. A rendszer képes azonosítani egy tárgyat, mint egy kisteherautó vagy teherautó méreteit és alakját anélkül, hogy le kellene olvasnia a rendszámtáblákat vagy rögzítenie kellene a vizuális részleteket.
A parkolási ágazat fokozatosan átáll a statikus infrastruktúráról a dinamikus, adatvezérelt menedzsmentre. Ez az átmenet megköveteli a különböző versengő igények – köztük a magángépjárművek, a teherszállítás, a megosztott mobilitási szolgáltatások és a közterület-használat – egyensúlyozását a járdaszegélyek és a parkolók korlátozott kapacitásán belül.
Ahogy a városok továbbra is újragondolják a parkolás szerepét a tágabb közlekedési ökoszisztémán belül, a precíz, magánélet-tudatos adatokat szolgáltatni képes technológiák egyre fontosabb szerepet fognak játszani. A LiDAR gyorsan fejlődik, mint kulcsfontosságú eszköz, amely lehetővé teszi az üzemeltetők számára, hogy a parkolási infrastruktúrát új szemüveggel tekinthessék meg parkoláskezelő rendszerükön belül.